Подключение и управление манипулятором
Создателям роботов и систем автоматизации не обойтись без таких устройств, как сервоприводы или, как их еще называют, сервомоторы. Обычные электрические моторы непрерывно вращают вал в одну или в другую сторону. Вы можете управлять скоростью вращения такого электромотора, изменяя частоту и напряжение для моторов переменного тока или модулируя ширину управляющих импульсов для моторов, рассчитанных на питание постоянным током. Однако если вам нужно повернуть вал двигателя на заданный угол или поддерживать вращение с заданной скоростью, то здесь пригодятся сервоприводы. Это первая статья из серии статей про сервоприводы и управление ими разными способами. Более подробно каждый из способов управления сервоприводами мы разберём в следующих статьях данного цикла, а сейчас, для начала, рассмотрим устройство сервоприводов и общие принципы управления, так как это та база знаний, которая нужна для успешной работы с сервоприводами не зависимо от выбранного способа программирования управления их работой.




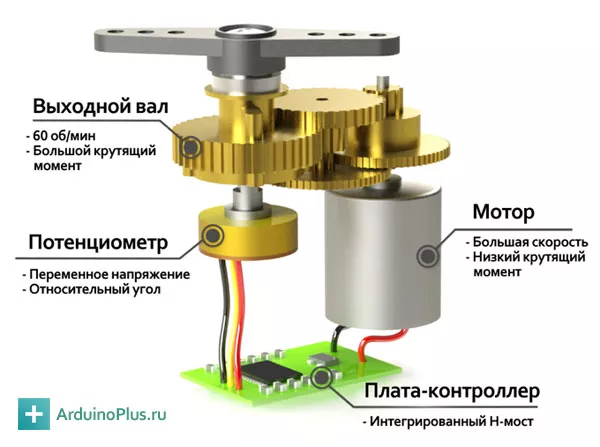
![Сервопривод SG90 + Arduino. Подключение [180 градусов]](https://qsy.by/wp-content/uploads/2018/11/servoprivod-printsip-raboti-e1542742319135.jpg "Посмотреть онлайн")


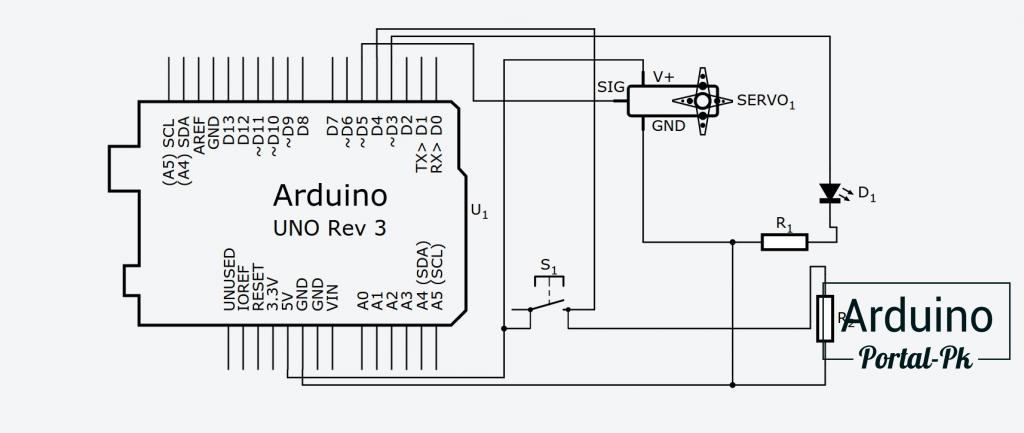
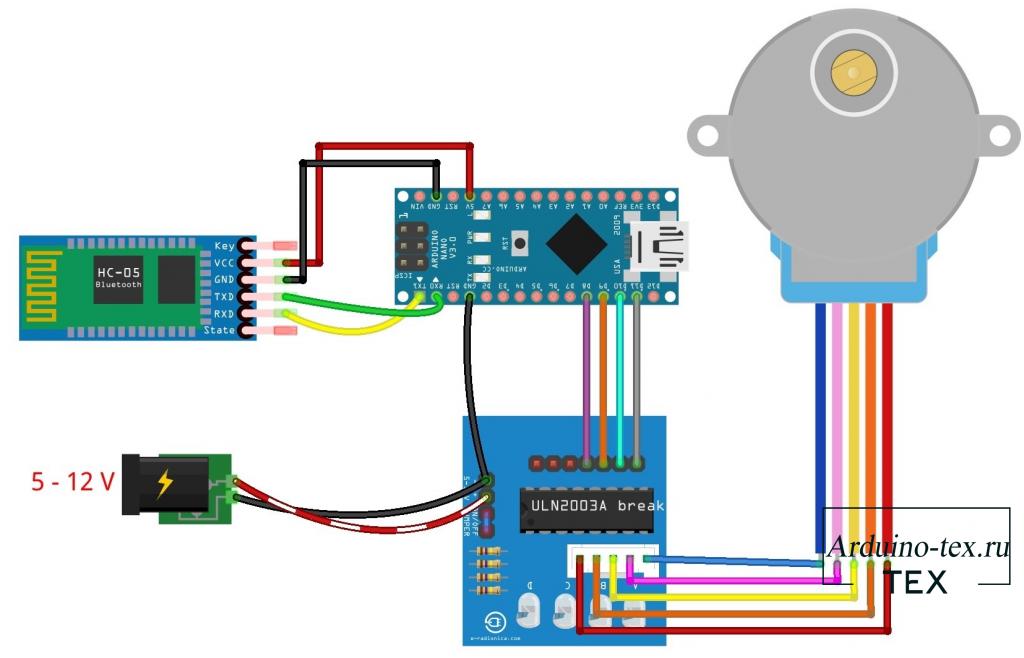
А ещё такие сервомоторы дадут возможность вашему роботу управлять руками или вращать головой. В сервоприводах PDM с удержанием угла положение выходного вала зависит от длины импульса. Для управления мотором необходимо подавать особый сигнал PDM Pulse Duration Modulation — импульсы постоянной частоты и переменной ширины. При поступлении с внешнего контроллера управляющего импульса начинка сервопривода генерирует мотору свой сигнал, длительность которого определяется датчиком обратной связи.




 Arduino")


Новые статьи. Принцип работы, подключение, примеры. Модуль Bluetooth HC Принцип работы, подключение. Чтение и запись данных. Обрабатываем команды от пульта.